公司地址:山东省济宁市任城区济阳街道御水豪庭47-1营业房
电话:+86 15169077601
E-MAIL:nikki@yanmingrobot.com
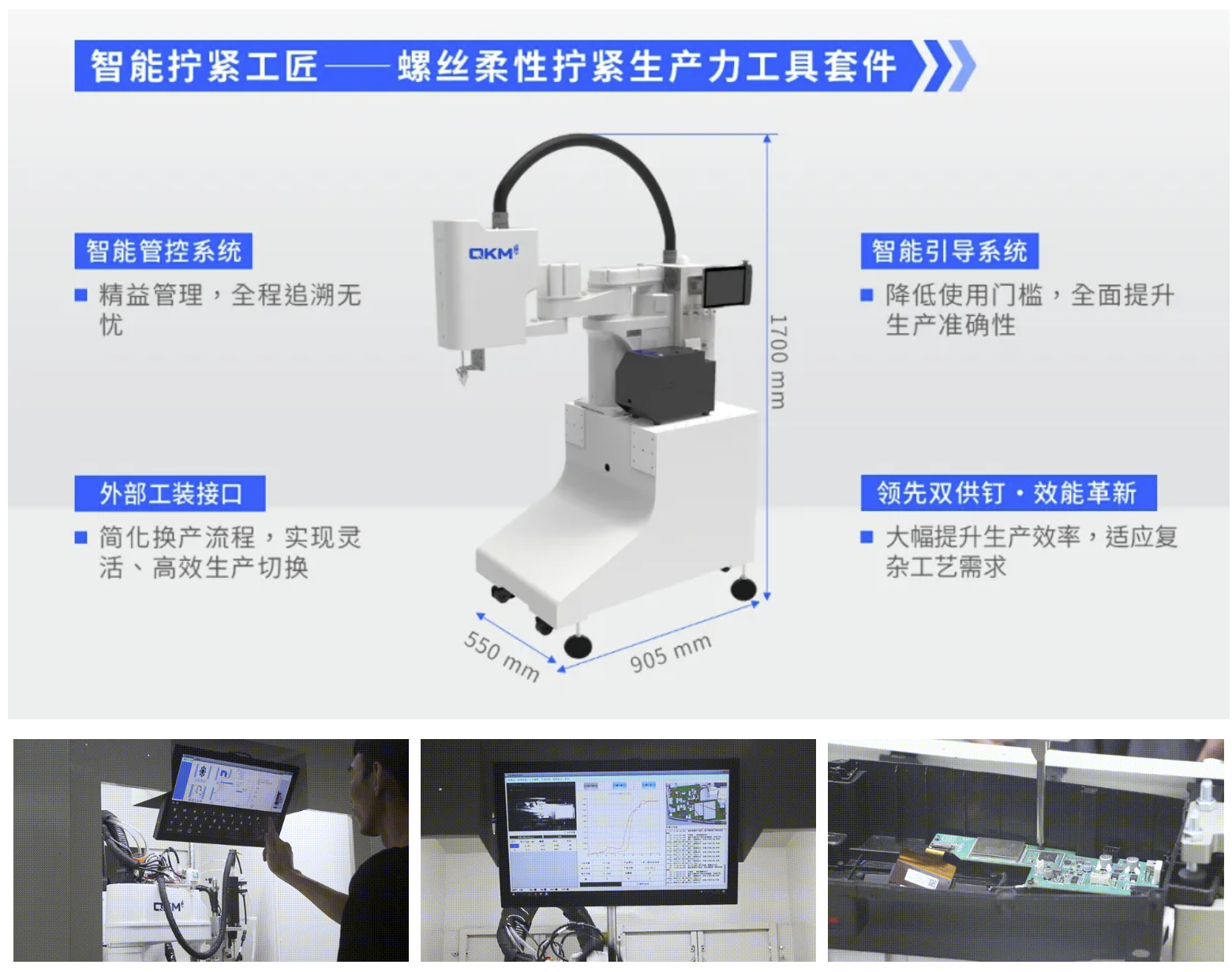
scara机器人是一种工业机器人,设计用于高效和精确的装配。它具有选择性柔顺、 XY 平面定位精度高、速度快、 Z 轴方向刚度高等特点。适用于高精度装配,高速高效的工作,紧凑的空间工作,灵活的装配现场。易于集成、编程和扩展,是自动化生产线的重要组成部分。
SCARA机器人是一种选择性柔顺装配机械臂,是一种专为高效精确装配而设计的工业机器人。它的名字反映了其独特的机械结构和工作特性,即在特定方向(通常是XY平面)具有较高的柔顺性,而在其他方向(如Z轴方向)则表现出良好的刚性。
以下是scara机器人及其应用特性的详细描述:
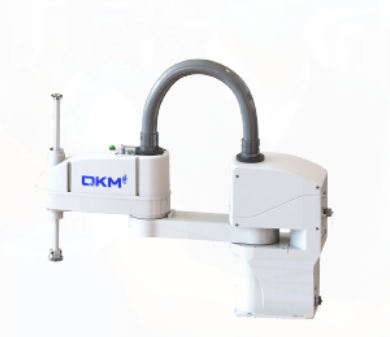
机械结构和工作原理:SCARA机器人通常包括四个关节:
轴1: 底座旋转关节,允许机器人作为一个整体在水平面上围绕 z 轴旋转。
轴2:拉伸伸缩关节,使机械臂在Z轴方向(垂直于XY平面)直线运动。
•第3轴:前臂进行旋转运动关节,使机器人发展手臂在XY平面上绕Y轴旋转。
•轴4: 手腕旋转关节,使机器人的末端执行器在 XY 平面的 x 轴上旋转。
这种结构使得SCARA机器人在XY平面上具有很高的定位精度和速度,而在Z轴方向上的运动相对简单和刚性。这种选择性的顺从性使其特别擅长于在二维平面内的快速和精确定位以及在垂直方向上的稳定装配操作。
应用特点:
1.高精度装配: Scara 机器人以其优异的重复定位精度(通常 ± 0.01 mm 至 ± 0.05 mm)而受到青睐,它适用于电子元件插件、精密装配、检查和其他需要高精度的操作。
2.高速高效:SCARA机器人由于其轻量化的结构和高效的驱动系统,可以实现高速运动和快速循环时间,显著提高生产线的产出率,尤其是在取放、分拣、包装等重复性作业中。
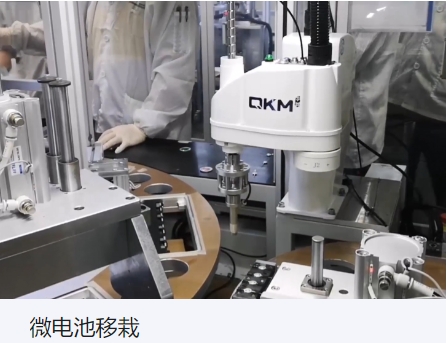
3.紧凑型空间作业: 斯scara器人占地面积小,工作范围灵活,适用于小型或密集型空间作业,如电子制造、半导体封装等场合。
4.适应性强:通过选择性的柔顺设计,SCARA机器人能够适应装配过程中零件的微小偏差,并能以合适的力度接触工件,避免接触力过大造成零件损坏,特别适合柔性装配场景。
5. 易用性与灵活性:现代SCARA机器人技术通常配备用户进行友好的编程语言环境和多种编程教学方式(如示教编程、离线编程、拖拽编程等),方便学生用户信息快速发展部署和调整工作任务。此外,部分SCARA机器人支持模块化结构设计,可以同时根据企业生产生活需求更换或扩展末端执行器,实现文化多样化的应用。
6.集成能力: 斯scara器人可以轻松地与其他自动化设备(如传送带、视觉系统、力传感器等)集成,形成一条完整的自动化生产线,实现物料搬运、视觉导向装配、力控制装配等功能。
应用领域:
电子制造:电子元件在SMT生产线上安装、插电、测试。
•汽车零部件装配: 小零件的装配、测试、分类等。
包装和码垛:包装,密封,标签和码垛产品。
•医疗和化验室自动化: 准确的液体处理、样本分类、试剂添加等。
塑胶五金加工:取出注塑件,转移冲压件,精密研磨等。
总之,SCARA机器人可以凭借其高精度、高速度、选择性顺应性和良好的空间适应性,在诸多问题需要进行平面设计定位与垂直装配的工业企业应用场景中发挥着关键因素作用,是现代自动化生产线的重要内容组成一个部分。随着科学技术创新进步,SCARA机器人通过不断学习融入社会更多智能化、网络化和协作化特性,进一步拓宽了其应用管理领域并提升了生产操作系统的整体效能。
文章转载自网络
了解更多scara机器人




 微信
微信